Hye Soo Yang, Professor Turbak, Professor Berg.
Introduction
Taking Introduction to Engineering course, I was introduced to an engineering lab environment for the first time. Through the course, I had the chance to use a 3-D printer, print out plastic models using a lazer printer, design my own robot driven by two motors, and construct and program a fire fighting robot. By using a LogoChip, an embedded microcontroller, I was able to easily learn how chips were designed and to program a system to put out a candle light.
For full course project documentation, please visit my course blog: http://hyang3.blogspot.com/
Final Project
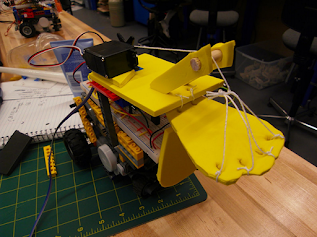
For our final project, my partner, Anna Lakesmith, and I worked on creating a fire-fighting robot car that would find a candle light ten feet away, move to it, and put out the light. We designed a pulley system to pinch the light source. We integrated four light sensors with our LogoChip, two in the front of the car and two towards the back, all facing front. The fire-fighting robot car first makes a 360 degree turn to see on which side the light source is. In the second turn, it turns to the side on which it found the light source and moves forward controlling the torque on the two wheels separately to approach the candle that is not placed straight ahead. Once it has gotten near the candle, it starts to nudge forward to approach the candle more precisely. When it has reached the point where the candle is in between the pinching plates, it rolls down the top plate to pinch off the light. * We made progress on this project together without dividing tasks.
The candle light was harder to put out than we thought. It also turned out that pinching system was not the best way to extinguish vertically oriented light source. For our next iteration, we attached wet tissue to our top plate and had the robot car move left, right, forward and back once it had the candle light enclosed in between the plates.




Hopping Rabbit Robot
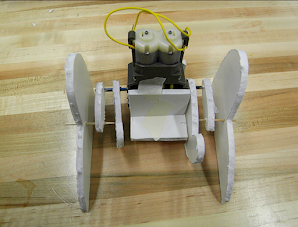
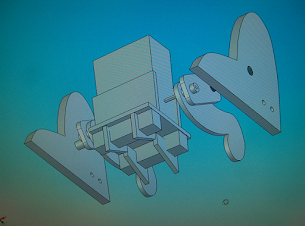
For one of the smaller projects, Aleja and I created a hopping rabbit robot. (Again, we worked on every part together) There were a total of two motors spinning hexagonal rods on each side to which we attached plastic parts cut out from a laser printer. Balancing the two back legs (larger and outer plastic piece) when it was off the ground was a challenge. We calculated center mass of the piece and made a number of iterations to achieve the result shown in the video below.


ART & TECH | HYE SOO YANG